I knew that Lego have done some robotics kits. You would program a big brick, connect motors and sensors and start the fun. Well, buying the kit at Brazil is pretty expensive: US$ 1000 by today's exchange rate. I found that if I import directly from Amazon I could get it for US$ 600, import taxes included !
Okay, here is my first robot. It's the basic starter model. I program it to avoid bumping into objects.
My second Robot was the ColorSorter. That one also comes with the kit.
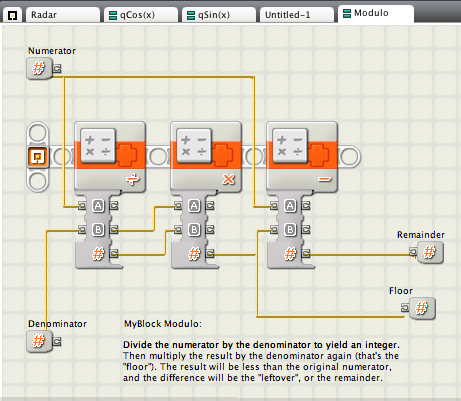
The kit comes with a NXT-G, a graphical programing environment based on LabView from National Instruments. When I said Graphical, I mean you have to drag blocks and make connection to program. See how hard is only to implement the modulo function :

It is not only hard to people used to program by "typing code", but it also generates big and sluggish programs. And program size really matters as memory is scarce. The alternative I found was Bricxcc, a Windows IDE for NXC ( Not eXactly C) , a C like language to programming the NXT2.0.
Here is the code for the Color Sorter Robot above. It is a direct translation of the NXT-G code that comes with the kit. I haven't done any improvements to make the robot smatter.
Okay, here is my first robot. It's the basic starter model. I program it to avoid bumping into objects.
The kit comes with a NXT-G, a graphical programing environment based on LabView from National Instruments. When I said Graphical, I mean you have to drag blocks and make connection to program. See how hard is only to implement the modulo function :
It is not only hard to people used to program by "typing code", but it also generates big and sluggish programs. And program size really matters as memory is scarce. The alternative I found was Bricxcc, a Windows IDE for NXC ( Not eXactly C) , a C like language to programming the NXT2.0.
Here is the code for the Color Sorter Robot above. It is a direct translation of the NXT-G code that comes with the kit. I haven't done any improvements to make the robot smatter.
/*
Lego color sorter
Attempt to convert from NXT-G to NXC
*/
#define COLOR_SENSOR SENSOR_3
#define TOUCH_SENSOR1 SENSOR_2
#define TOUCH_SENSOR2 SENSOR_1
#define PRESSED 1
#define NOT_PRESSED 0
#define UNTIL_BUMPED(x) until((x) == PRESSED);until((x) == NOT_PRESSED);
enum color_t {
BLUE = INPUT_BLUECOLOR,
RED = INPUT_REDCOLOR,
YELLOW = INPUT_YELLOWCOLOR,
GREEN = INPUT_GREENCOLOR
};
sub initializeSensors(){
//Color Sensor
SetSensorColorFull(IN_3);
//Touch sensor 1
SetSensorTouch(IN_2);
//Touch sensor 2
SetSensorTouch(IN_1);
}
task main(){
initializeSensors();
OnFwd(OUT_C,50);
until(TOUCH_SENSOR1 == PRESSED);
RotateMotor(OUT_C,50,55);
while(true){
color_t color = COLOR_SENSOR;
switch(color){
case BLUE:
//PlaySound wait for completion
OnFwd(OUT_B,50);
UNTIL_BUMPED(TOUCH_SENSOR2);
RotateMotor(OUT_B,50,0.8*360);
Wait(MS_300);
break;
case RED:
//PlaySound
RotateMotor(OUT_C,40,90);
OnFwd(OUT_B,50);
UNTIL_BUMPED(TOUCH_SENSOR2);
RotateMotor(OUT_B,50,0.8*360);
RotateMotor(OUT_C,40,270);
break;
case YELLOW:
//PlaySound
RotateMotor(OUT_C,40,180);
OnFwd(OUT_B,50);
UNTIL_BUMPED(TOUCH_SENSOR2);
RotateMotor(OUT_B,50,0.8*360);
RotateMotor(OUT_C,40,180);
break;
case GREEN:
//PlaySound
RotateMotor(OUT_C,40,270);
OnFwd(OUT_B,50);
UNTIL_BUMPED(TOUCH_SENSOR2);
RotateMotor(OUT_B,50,0.8*360);
RotateMotor(OUT_C,40,90);
break;
default:
//Play Sound - try again
OnFwd(OUT_B,50);
UNTIL_BUMPED(TOUCH_SENSOR2);
RotateMotor(OUT_B,50,0.8*360);
}
}
}
No comments:
Post a Comment